个人中心
个人中心 Enjoy后台
Enjoy后台 登出
登出

机器人的一小步,AI 的一大步。
近日,美国西北大学(Northwestern University)的研究人员首次开发出一种可以完全自行设计机器人的 AI 算法。
当该团队向 AI 程序发出提示:“设计一个可以在平坦表面上行走的机器人”。
出乎意料的结果发生了,引用西北大学官方的评价,「大自然花了数十亿年的时间才进化出第一个行走的物种,而新 AI 算法程序将进化压缩到闪电般的速度」。
不到 30 秒,就能设计出一个成功行走的机器人。
为了验证计算机中模拟的系统在实践中是否有效,研究人员通过 3D 打印设计的模具并填充硅胶,最终在 AI 系统的驱动下,得到了如下所示:一个虽然有些“蠢萌”,但是能以“大约是人类平均步幅的一半”的速度开始行(蠕)走(动)的机器人。
不少网友网友评价道:
-
奥创世界,这个 AI 成精了;
-
未来已至;
-
AI 审美还是有点差;
-
......

“AI 设计工具新时代的开端”
这个像是上了发条的玩具,是由无机材料制成的,其背后运用的 AI 程序还可以在轻便的个人电脑上运行,并从零开始设计全新的结构。
基于此,西北大学的研究员在《美国国家科学院院刊》上发布了一篇《Efficient automatic design of robots》论文(https://www.pnas.org/doi/10.1073/pnas.2305180120),分享了这一最新研究成果。
在领导这项工作的 Sam Kriegman 研究员看来,机器人本身又小又软,而且形状诡异,实则并不起眼。
不过,它的诞生,代表了 AI 设计工具新时代的开端,未来这些工具就像动物一样,可以直接作用于世界。

从零到走路只需几秒钟
放眼市场上已存在的很多 AI 系统,创建进化机器人需要生成随机变体,对其进行测试,用新的变体完善表现最佳的机器人,然后再次测试这些变体。
周而复始的工作通常需要高耗能的超级计算机和巨大的数据集支持。同时,即使在处理了所有这些数据之后,那些系统也受制于人类创造力的局限,仅仅是模仿人类过去的作品,而没有产生新想法的能力。
在本次实验中,研究员使用一种自动优化方法,可以通过追踪机器人行为中的失败以找出物理结构中的错误或低效部位,从零开始设计可以自主移动的机器人。
以这种方式改进机器人,它可以比以前(设计师以试错的方式尝试不同的机器人设计)更快地优化机器人中互相关联的部件。这为快速、按需定制人工智能驱动的机器人设计开辟了道路,可用于各种任务。
“我们告诉 AI,我们想要一个可以穿越陆地的机器人。然后我们只需按下一个按钮就可以了!它在眨眼间就生成了一个机器人的蓝图,它看起来与地球上行走过的任何动物都截然不同。我把这个过程称为‘即时进化’”,Sam Kriegman 表示。
这一过程到底是怎么实现的?
具体来看,研究人员在论文中展示了一种可替代的、可拓展的方法,可以在最少的先验假设情况下快速且经济高效地设计新型机器人身体:
只需要 10 次设计尝试,就能在笔记本电脑上用不到 30 秒的时间高效、自动地生成定制机器人。
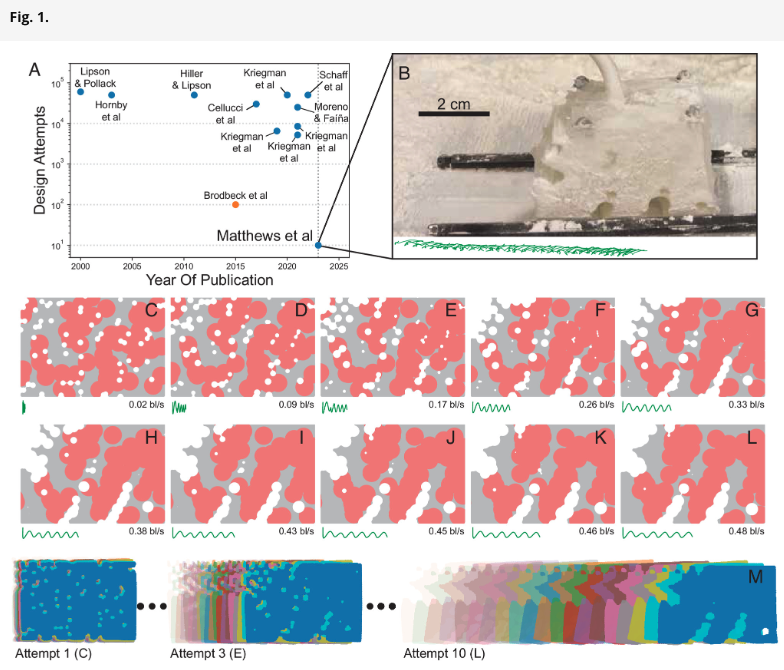
当然,以上主要是在计算机中模拟的。这比所有已报道的利用计算机模拟的机器人设计方法都要高效得多,比不进行模拟的方法少了一个数量级的设计尝试。
尽管之前也有很多研究人员探索了不少虚拟机器人自动设计的方法,但迄今为止,物理机器人的自动设计主要是通过进化算法实现的:设计变体通过随机变异和选择进化。
正如上文所述,这一过程的试错性质可能导致在虚拟环境中对数千甚至数百万个机器人进行评估,然后选择一个适合物理制造的机器人。其他的进化方法可以直接进化出物理机器人,而无需借助模拟,但这需要数以百计的物理试验,再次降低了效率。
在这里,研究人员使用了基于梯度下降优化的方式,可以有效地沿着设计空间的路径找到最优设计。
事实证明,将基于梯度的优化技术应用于机器人设计也具有挑战性,因为与所有运动生物一样,机器人的身体规划(如形状和电机分布)与其行为之间存在复杂的反馈回路。
确定机器人身体规划的哪个方面导致了机器人行为的低效,以及如何改变该身体部分以改善行为,是 AI 设计机器人过程中非常常见且必须解决的问题。
为此,研究人员采用了近些年才出现的可微分物理模拟器使得基于梯度的虚拟机器人设计成为可能。即机器人的形状或材料特性中导致不良行为的方面可以被识别出来,并以非随机的方式减轻以改善其行为。
但这些方法无法从根本上改变机器人的内部结构(肌肉组织、质量分布和空隙)或外部结构,如增加新的肢体。因此,研究人员最新研究了一种新的算法,它可以:
(i) 模拟并评估虚拟机器人的行为适应性;
(ii) 找出机器人在整体形状、拓扑结构(空隙数量)、肢体数量和形状、质量分布、肌肉组织和行为控制方面的不足;
(iii) 同时改变所有这些方面,以便在下一次模拟中改善机器人的行为。
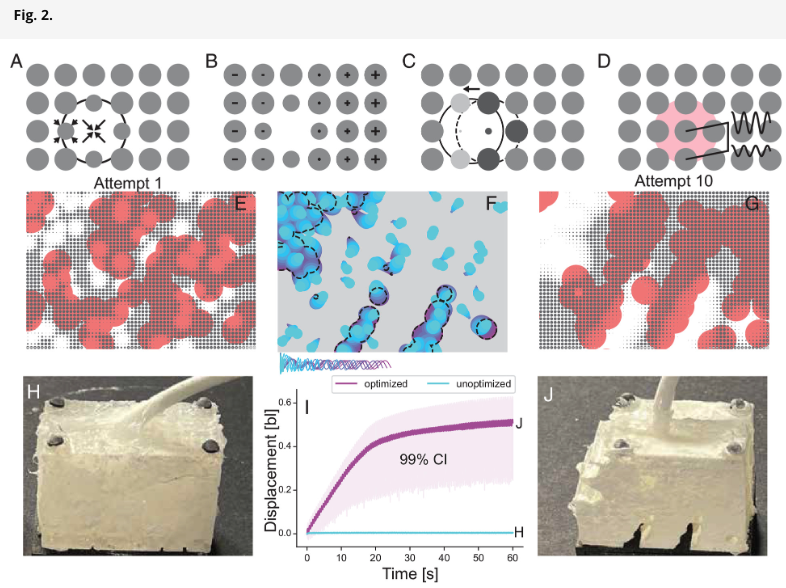
经过证明,这一过程只需重复九次(只需进行 10 次模拟),就能在构建设计时保留优化后的功能。这比最先进的物理机器人自动设计算法要高效得多。

3D 打印出模具,实践中测试
为了验证计算机中的模拟在实践中是否有效,研究人员通过 3D 打印设计的模具。在材料方面,研究人员准备了一个 20×14 厘米的长方体中随机放置 64 个空洞和 64 块“肌肉块”。
然后研究员使用液体硅橡胶填充到模具中,并使其固化几个小时。当团队将固化的硅胶从模具中取出时,它变得又软又柔韧。
通过 3D 打印出模具之后,他们将空气注入长方体的小空隙中,以模拟肌肉的收缩和扩张。
制成的机器人每个都只有一块肥皂大小,像块状的小卡通人物一样。研究人员为人工智能设定了开发陆地运动的目标,然后将新生的机器人置于虚拟环境中进行进化。
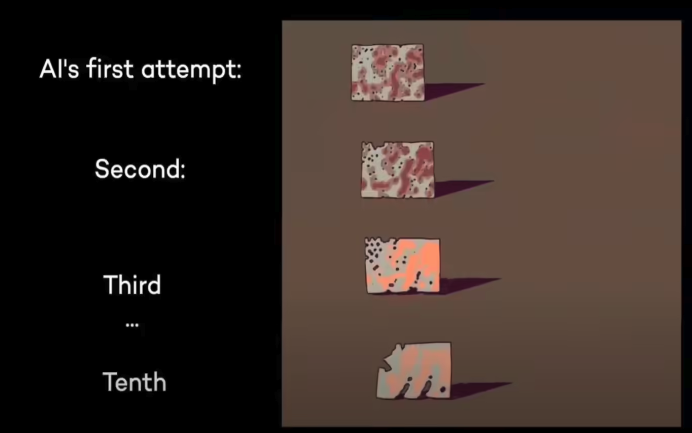
起初,这个机器人可以摇晃,但绝对无法行走。
AI 知道自己尚未达到目标。因此迅速迭代了设计。在每次迭代中,AI 评估其设计、识别缺陷,并逐渐修改模拟块的结构。
更令人惊讶的是,AI 独自想出了与自然界相同的行走解决方案:腿。但与自然界绝对对称的设计不同,人工智能采取了不同的方法。由此产生的机器人有三条腿,背部有鳍,面部平坦,上面布满了洞。
“这很有趣,因为我们没有告诉人工智能机器人应该有腿”,Kriegman 表示,“它重新发现腿是在陆地上移动的好方法。事实上,腿式运动是陆地运动最有效的形式。”
最终,经过九次尝试,它生成了一个每秒可以行走其身体长度一半的机器人——大约是人类平均步幅速度的一半。
整个设计过程——从一个零运动的无形块到一个完整的行走机器人——在笔记本电脑上只花了 26 秒。
“现在任何人都可以观察 AI 实时生成越来越好的机器人身体的进化过程”,Kriegman 表示,“以前,进化机器人需要在超级计算机上进行数周的试验和错误。当然,在任何动物可以在我们的世界里奔跑、游泳或飞翔之前,都有数十亿年的试错过程。这是因为进化没有先见之明。它无法预见未来,无法知道特定的突变是有益的还是灾难性的。我们找到了一种方法来消除这种蒙蔽,从而将数十亿年的进化压缩为瞬间。”

AI 设计的机器人未来
通过深度研究,得到的结果最终证明了移动机器人的高效设计自动化,不过,Kriegman 也表示,大部分设计流程仍有待优化。例如,制造过程包括几个可以通过嵌入式 3D 打印实现自动化的手动步骤;物理模型的计算效率可以优化为比实时运行得更快,并且梯度计算可以优化为也更快。
截至目前,尽管这个由 AI 设计的首个机器人只能向前移动,但 Kriegman 也在畅想未来的应用场景,譬如:
-
有一天,类似的机器人可能能够在倒塌建筑物的废墟中导航,遵循热图像和振动信号来搜索被困的人和动物,或者它们可能会穿越下水道系统来诊断问题、疏通管道和修复损坏;
-
人工智能还可能设计出纳米机器人,进入人体并引导血液流动,以疏通动脉、诊断疾病或杀死癌细胞。